
Recycler
One of my first robots. Built to demonstrate simple navigation and pickup rotines.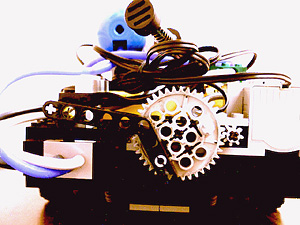
This is the back of the robot. It shows the pneumatics engagement component. When the front sensor is triggered, this gear shifts the CAM beam, which in turn changes the valve of the pneumatics. This will open or close the claw.
Closer view of the claw component. 2 small tires were used to allow for the grabber to be sticky enough to hold whatever was being picked up.

[ad name=”GoogleAS728x90″]
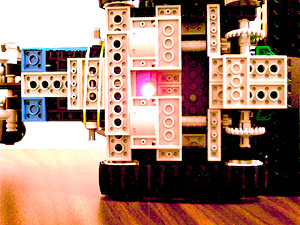
Showing the bottom of the Recycler. The light sensor was used to enable the bot to track along a black line.
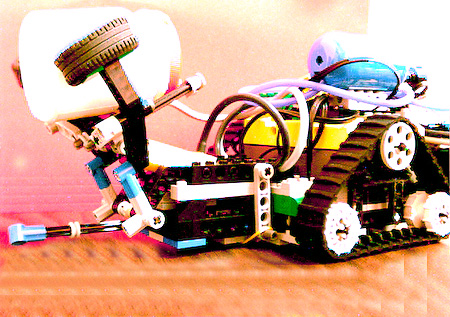
This picture shows a number of components. The first being the robot in pickup mode. It has detected something in front of it, and has picked it up. The beam at the front is a crude method for detecting when something is in front that needs to be picked up. I have since discovered much better ways of doing this. The unit works as follows – navigate fwd along a line, when the beam is hit, pressure triggers the front sensor hidden behind the claw unit. This triggers the pneumatics to pickup the item.
Rate This Post:  (1 votes, average: 5.00 out of 5)
(1 votes, average: 5.00 out of 5)![]() Loading...
Loading...

Comments: