
MarbleMiser 2
MarbleMiser2 takes First Place in RTL15 – Deep Yellow Robotics Event here in Toronto. It was a great day. 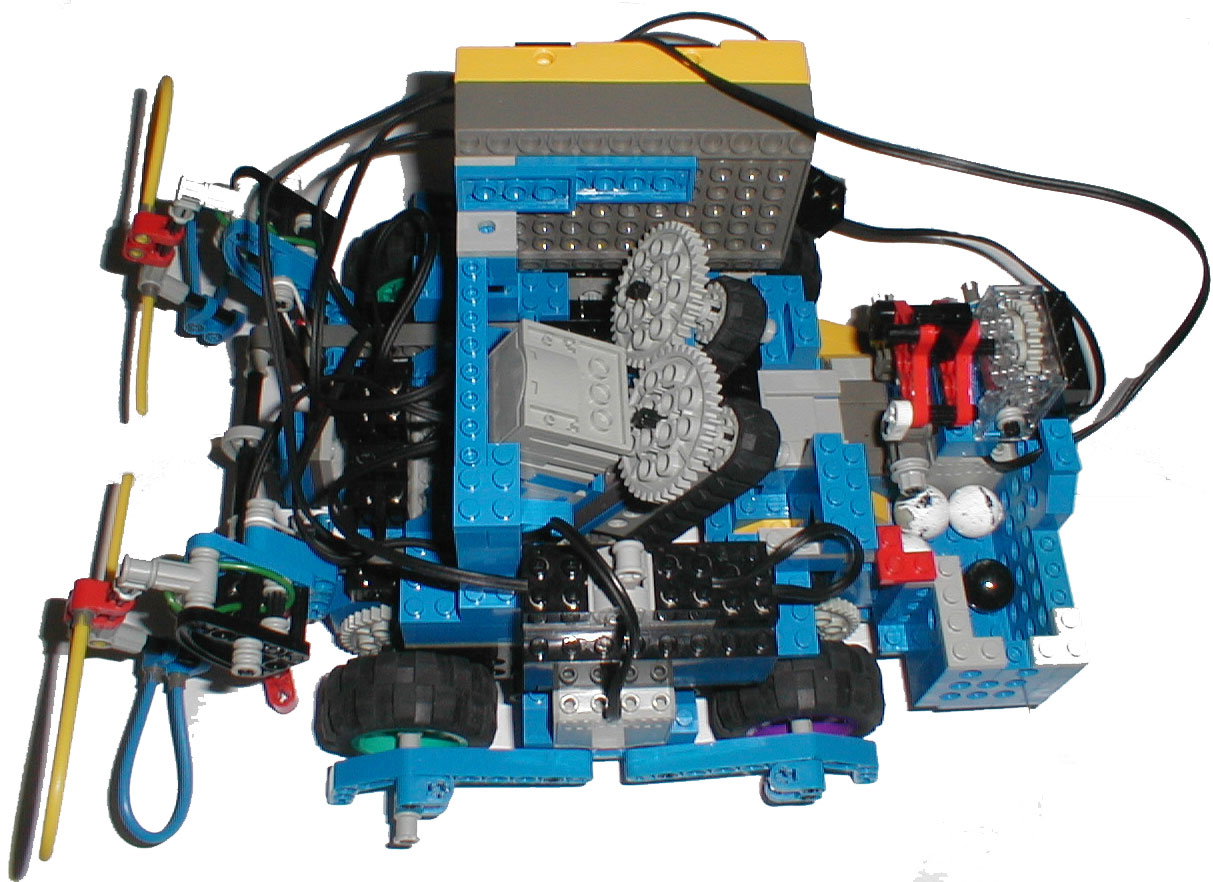 The competition consisted of 2 events. The first being Connect Four, the second being Marble Sorting. There were 9 robots competing in the Marble Sorting competition. All of which were great designs. Some robots (including MarbleMiser2) were designed to move around the field while picking up marbles and throwing out the opponents colour. Others used more simple techniques. Read on for more details…
The competition consisted of 2 events. The first being Connect Four, the second being Marble Sorting. There were 9 robots competing in the Marble Sorting competition. All of which were great designs. Some robots (including MarbleMiser2) were designed to move around the field while picking up marbles and throwing out the opponents colour. Others used more simple techniques. Read on for more details…
MarbleMiser2 is a 2nd generation marble sorting robot. It was developed for an event held by RTL Toronto and is loosly based on my first robot MarbleMiser. The goal of the competition is to compete against another robot in an 4″ by 4″ arena. There are black and white marbles. At the beginning, each competitor is assigned a a marble colour to seek. There is a time limit of 3 minutes whereby you have to be back at your home square. A winner is determined by the robot that has the most of their assigned marbles withing the border of home base. The robot can either store the marbles in or on it, or “hold” then underneath. Each competitor is awarded1 point for each of their colours and -2 points for the opposing colour. So you can’t win by just grabbing all marbles.MarbleMiser2 is outfitted as follows:
There are black and white marbles. At the beginning, each competitor is assigned a a marble colour to seek. There is a time limit of 3 minutes whereby you have to be back at your home square. A winner is determined by the robot that has the most of their assigned marbles withing the border of home base. The robot can either store the marbles in or on it, or “hold” then underneath. Each competitor is awarded1 point for each of their colours and -2 points for the opposing colour. So you can’t win by just grabbing all marbles.MarbleMiser2 is outfitted as follows:
- Light Sensor 1 – triggers the marble sorting motor to keep or dispense marbles.
- Light Sensor 2 – once the time limit is up, it will seek either black or white ground markers (identifies home).
- Touch Sensor 1 & 2 – triggers left and right hits. These are 2 Cybermaster sensors multiplexed on one port.
- Motors 1 & 2 – left and right drive motors.
- Motor 3 – powered by a seperate 9V source, this is always on. It drive the marble catcher belt mechanism
[ad name=”GoogleAS728x90″]
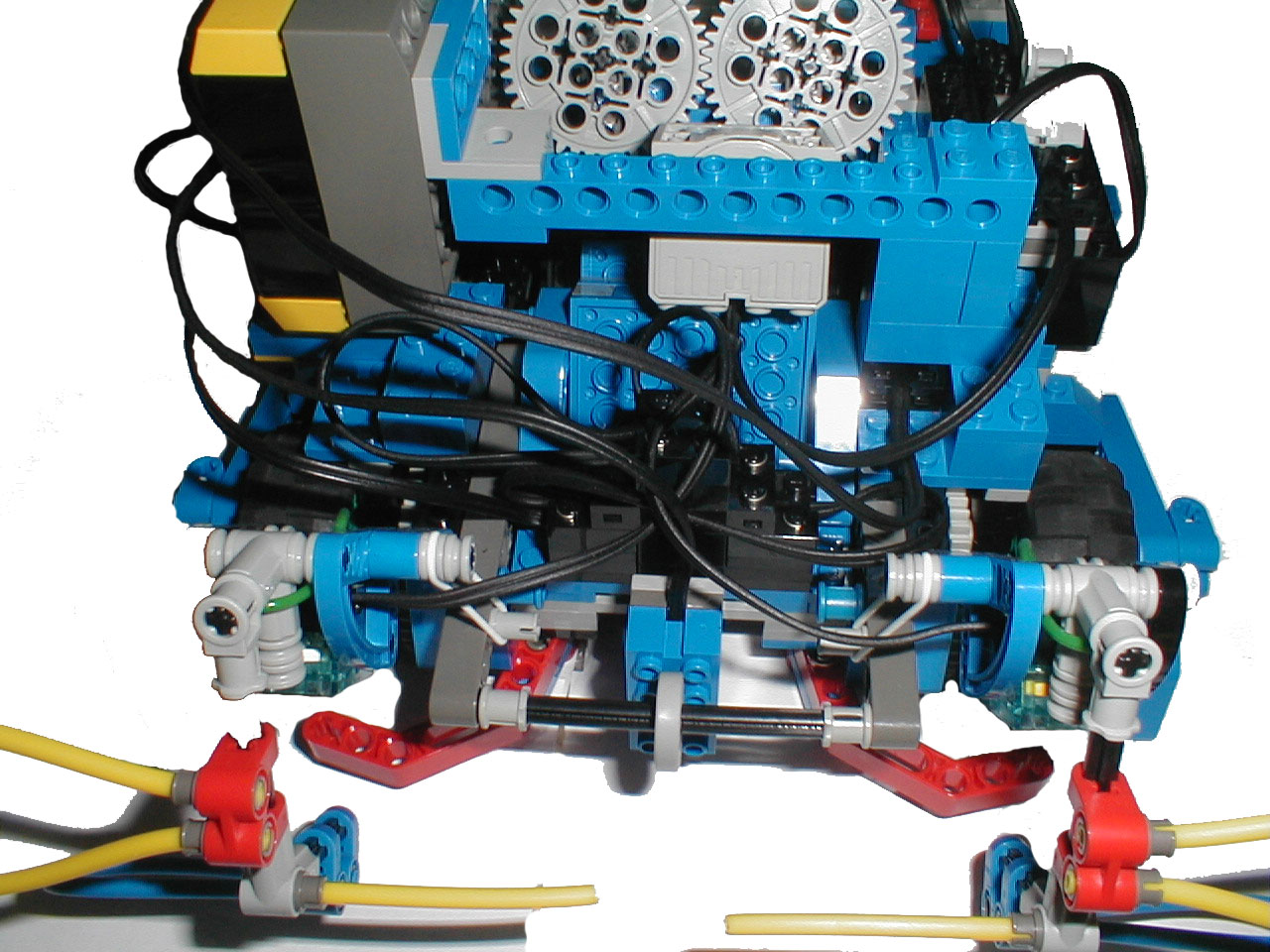
The front view shows the dual touch sensors used for edge detection. These are the Cybermaster touch sensors. They are outfitted with resistors of different values. I have used a single port for the two of these sensors. The in NQC the sensor is set as LIGHT. By doing this, when each sensor is pressed, it returns a different value. For example, if the left bumper is pressed, it reads 23, for right it reads 66, for both pressed simultaneously, it reads 100. This allows the robot to know which side it was hit on and react accordingly.
You can also see the red guides that are used to channel marbles underneath where the sorter mechanism can get a hold of them. The light sensor on the front kicks in when the 2:30 time is reached. The robot will go into goHome() mode and seek the home base (black or white square).
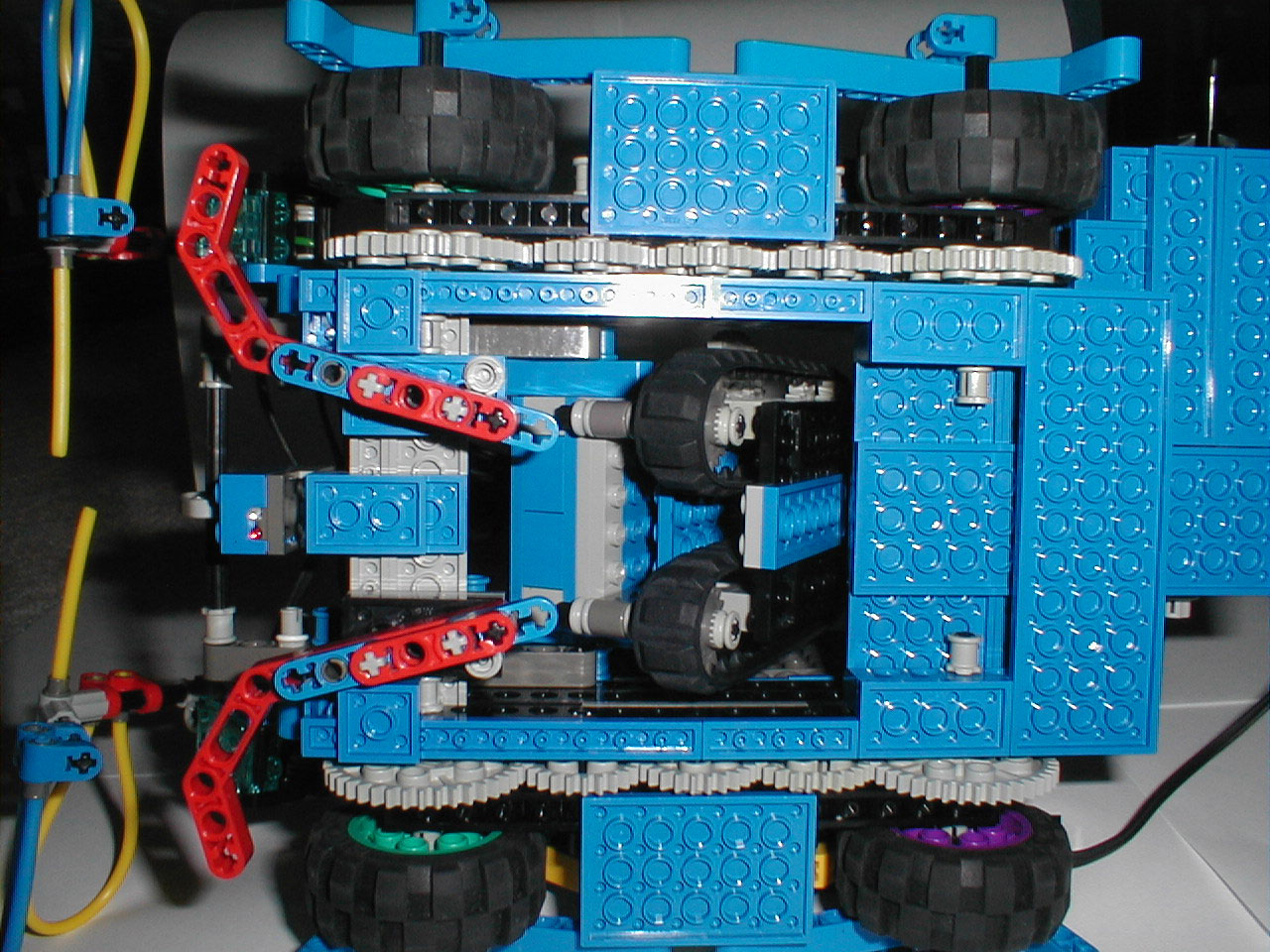
The bottom view shows in detail how MarbleMiser 2 gets marbles into the sorter. As the robot navigates searching for marbles, they are guided toward the dual tracks. The tracks required many attempts to get the geometry just right. Things that had to be considered
1) Diameter of a marble
2) Slipperyness of a smooth glassy surface
3) Angle of the belt drive.
The belt drive angle is what makes or breaks this robots’ ability to pickup a marble. If the angle is too steep (perpendicular to ground), the belt drive catches the surface and jumps around. It will catch marbles, but may break due to the stress put on it. If the angle is too low, the marbles will just bounce around as the belt tries to catch them. After several attempts, I managed to find its’ sweetspot
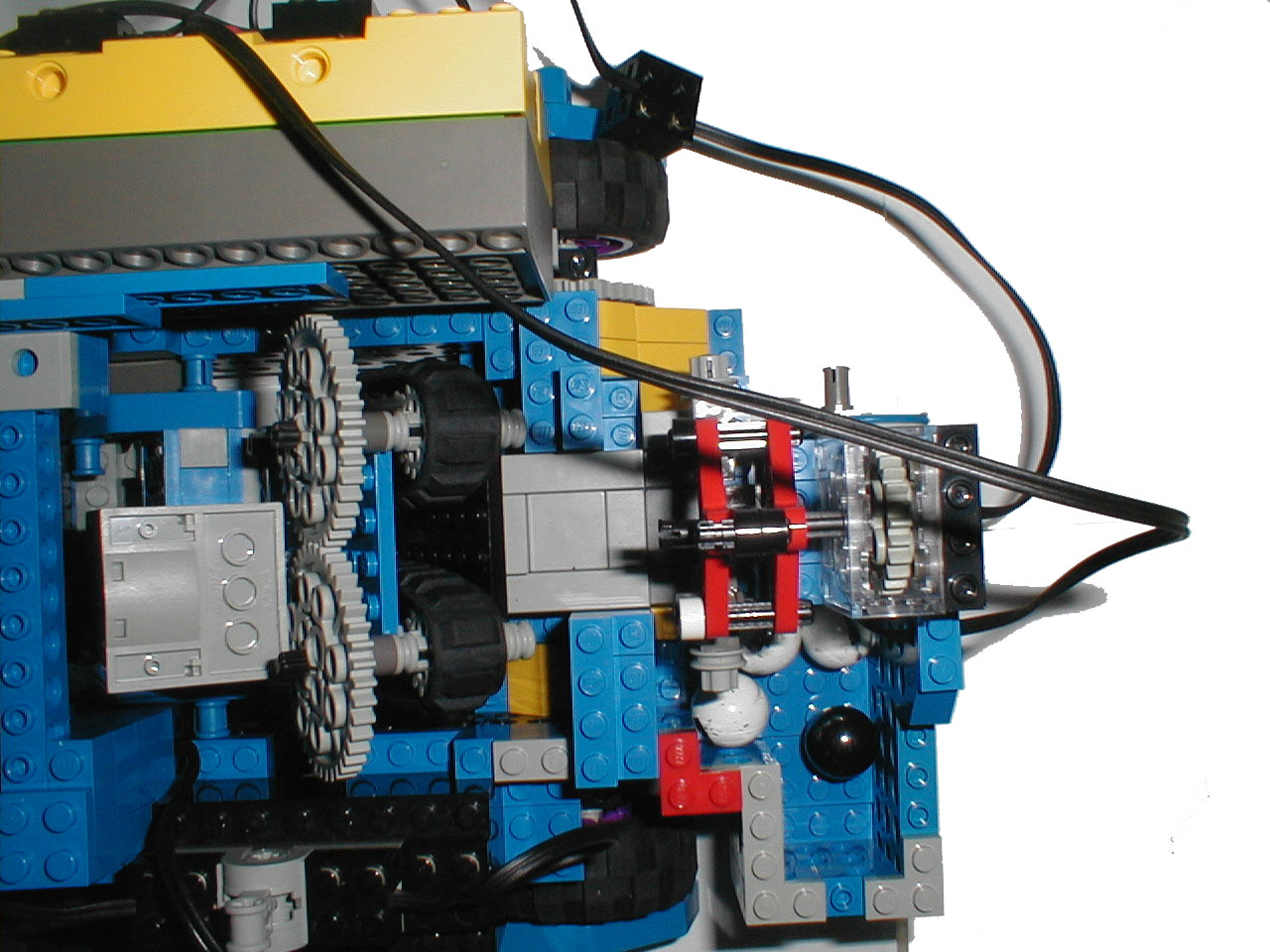
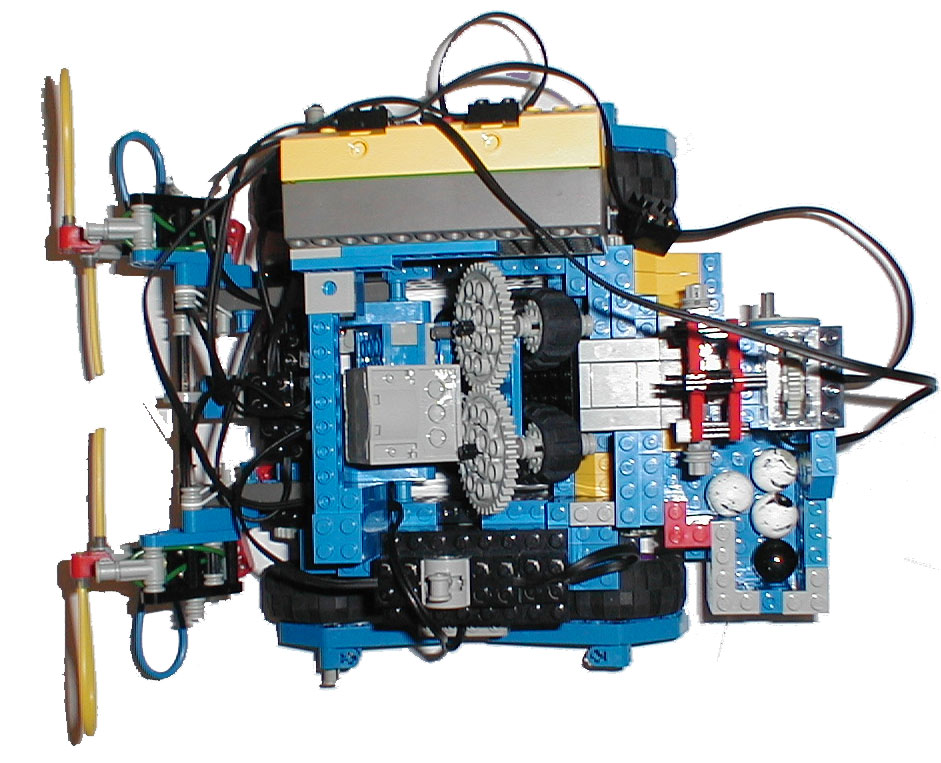
A closeup view of the sorting mechanism. Once the belt unit gets a marble, it delivers them to the staging chute. The marble then rolls down to the end where a claw mechanism (red) holds it in place. After a second, a light sensor reads the light value and determines whether to keep or eject the marble. It will trigger a motor driving a worm gear hooled to the claw. The claw will shifts to move the marble to either side. If there are number of marbles in the queue, the claw is built such that it keeps the others from rolling off or into the keeper bin. The keeper bin can be seen at the bottom right of the picture.
[ad name=”GoogleAS728x90″]
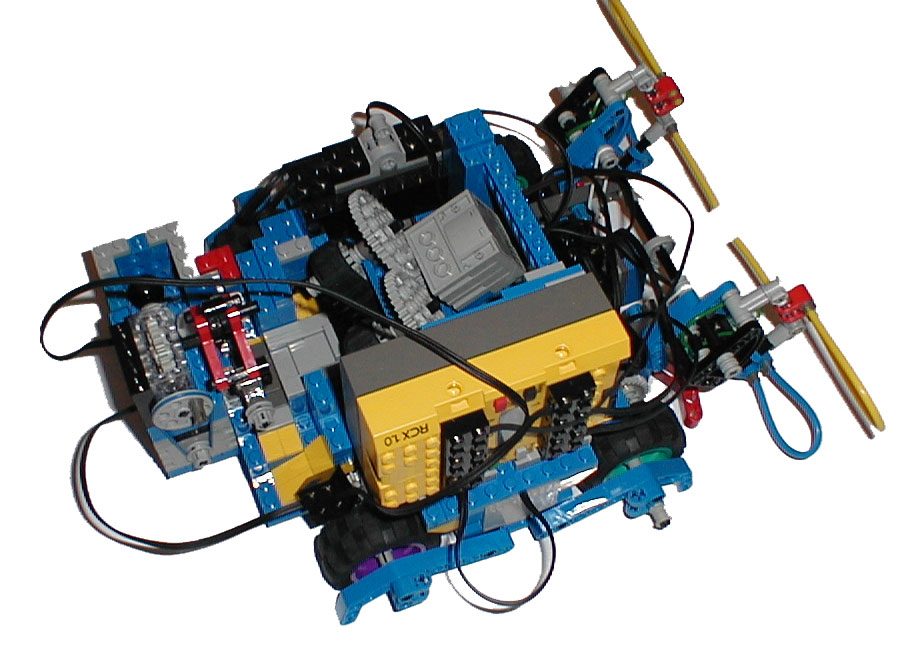
A full view form the top. Showing the RCX, belt drive and sorting mechanics.
Rate This Post:  (1 votes, average: 5.00 out of 5)
(1 votes, average: 5.00 out of 5)![]() Loading...
Loading...

Great site.