
Configuring Lost Model Alarm – Flip 32 and Cleanflight
 Earlier, I created an enhanced lost model alarm using an ATTiny85 and some Arduino code. I wanted to have different alarm modes that could be triggered depending on the position of the pitch trim pot. I’ve since ditched that config for simplicity. The hardware and Arduino Sketch are still valid, so you can use those if you want to build one. These instructions will show how to connect the hardware to a Flip32+ and configure it in Cleanflight.
Earlier, I created an enhanced lost model alarm using an ATTiny85 and some Arduino code. I wanted to have different alarm modes that could be triggered depending on the position of the pitch trim pot. I’ve since ditched that config for simplicity. The hardware and Arduino Sketch are still valid, so you can use those if you want to build one. These instructions will show how to connect the hardware to a Flip32+ and configure it in Cleanflight.
Note about the Arduino code:
If you have a look at the code (link above), it’s pretty straight forward. If the PWM value is > 1700, then trigger the alarm and flash a LED. Else, do nothing. The default state is off. Also note that there are some tricks you have to pull to get the ATTiny to play well with the Tone() command (detail in the link).
Steps:
- Configure one of your transmitter Aux toggles in the Mixer settings. In my case, I am using the Gear switch to toggle Aux 2 LOW/HIGH. Set as FULL and 100%.
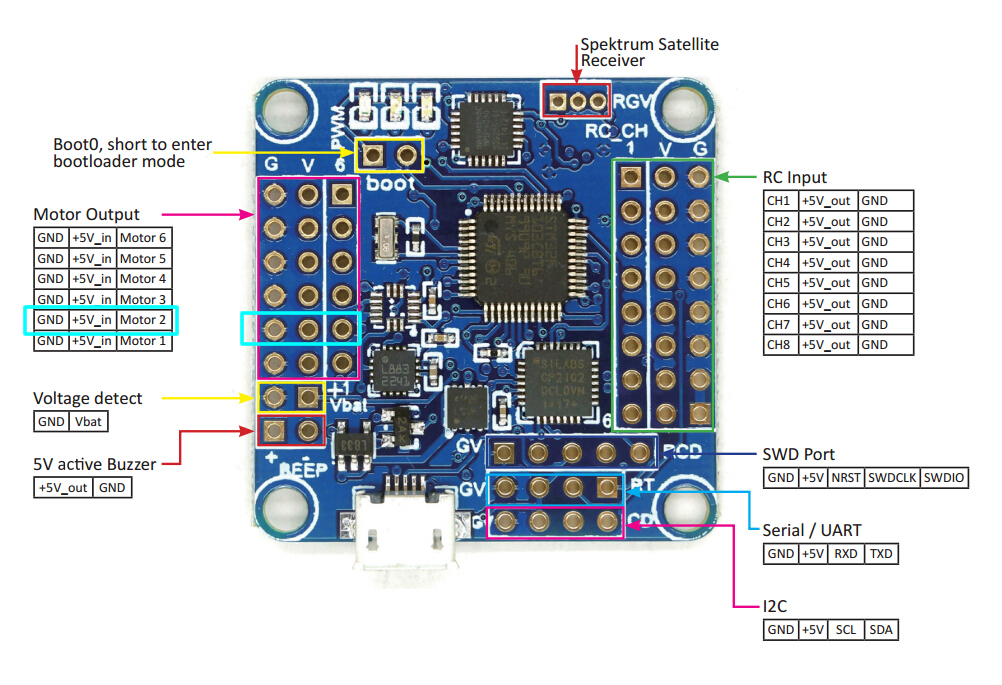
- The Flip32+ has 6 motor ports. In my set-up, I have the motors on 3, 4, 5 & 6. The reason for this is because I have SERVO_TILT enabled to control my FPV camera on Motor #1. This shifts the quad motors to 3-6.
- Connect the alarm on motor port #2 (image).
- In Cleanflight go to the Receiver tab and observe the values that are passed Aux 2 when you toggle the Aux switch. If you don’t see them changing, the rest won’t work.
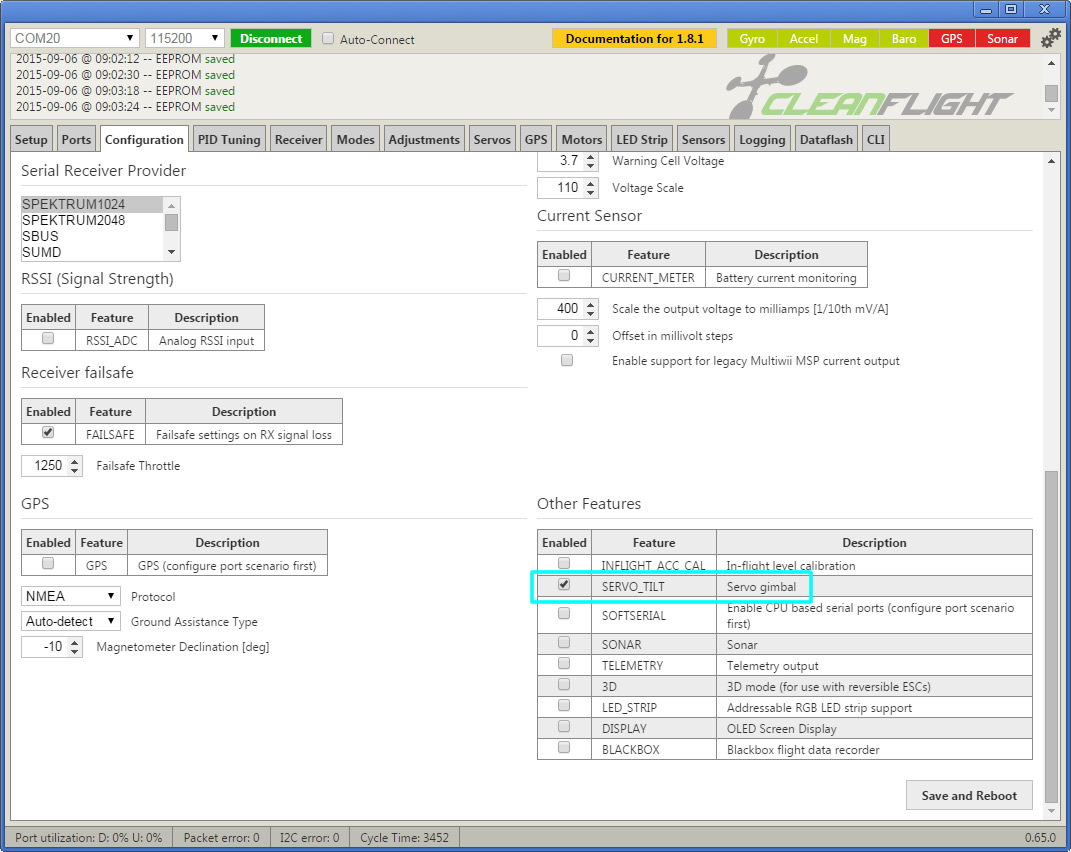
- In Cleanflight, enable the Servo Tilt option (image)
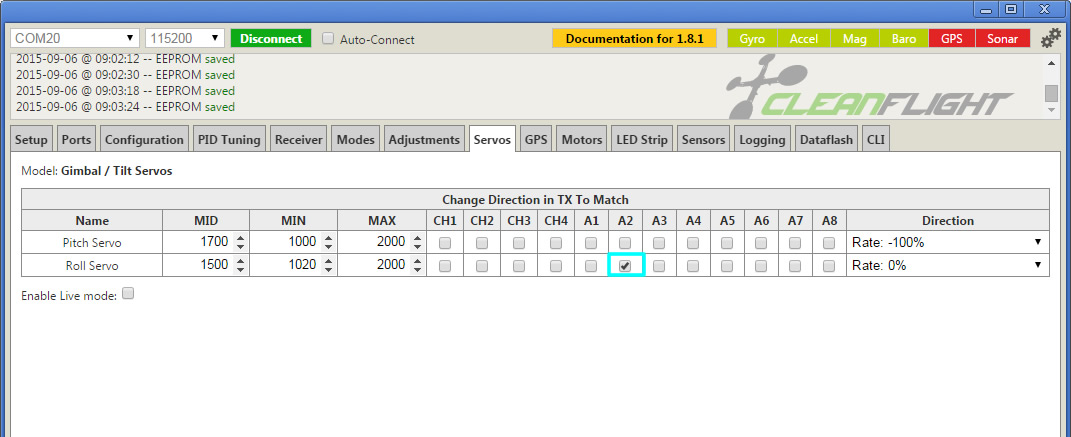
- Go to the Servos tab and enable A2 on the Roll Servo with the settings as shown (image)
- Power up your model with a battery and give it a try. The alarm should trigger on/off when you toggle the Aux switch.
Note: I also have the Beeper enabled on Aux 2, so, when the beeper triggers, it will also trigger the alarm. This is useful if you have voltage warnings enabled.
[ad name=”GoogleAS728x90ImgOnly”]




Comments: